A PhD is an exercise in learning to define and solve problems. This post will describe some of those problems and how I addressed them. I would have liked to see this sort of post back then, and hopefully this will give some idea of the process. This is, of course, very focused on experimental fluid mechanics (and my research in particular), but some general ideas may perhaps be gleaned.
The goal of my PhD was to create a better system of generating vortical gusts, and seeing how they interact with a wing. (For a more detailed summary, see this post.) There were several stages of the research: goal definition, identifying limitations, choosing experimental capabilities and instrumentation, building the hardware and software, and choosing how to analyze and present the data.
Limitations
Experimental facilities all have limitations. For my experiments, the water tunnel had a test section of fixed width (46 cm), length (150 cm), and depth (46 cm), and could work within a limited speed range (0.08-0.48 m/s) with pump frequencies (5 – 30 Hz).

Since this is a physical system, it doesn’t produce a perfect steady flow of water. The shape of the tunnel yields a low- (but non-zero-) turbulence flow, and the pump itself introduces a small perturbation due to its frequency of rotation.
The test section itself has some linear bearing rails for mounting hardware on top. And above the test section, there is a large pipe and a large ceiling beam, which limit the height of any hardware.
The use of water in the facility has its pros and cons. Pros: water is dense, so it produces nice strong forces and pressure differences; it is easy to visualize flow with PIV particles, bubbles, or dye. Cons: water is dense, so it is hard to move and may create too-strong forces; water doesn’t play well with electrical components or certain materials like iron or hygroscopic plastics; the water’s top surface can deform due to obstacles in the flow (such as airfoils) and lead to unwanted pressure fields; algae will grow unless you bleach the water frequently; towels are necessary.
Hardware summary
The general idea was to have the test airfoil hang vertically from a force/torque sensor at the cross-stream center of the tunnel, downstream of the gust generator. It also needs to be able to sit at different angles of attack. To reduce surface effects, it needs to pass through a free-surface plate without touching it. This is necessary to reduce the deformation of the water’s surface, since the water tunnel isn’t sealed at the top. Upstream of the airfoil and free-surface plate, the gust generating system needs to be actuated in both rotation and lateral position. To ensure that the gust generation system works properly, the rotation angle and linear position need to be measured.
Each of those parts needs to be precisely designed, and many of them depend exquisitely on each other! So many decisions to make! The next section steps through my thought process, and resulting choices.
Equipment decisions
I started at the general level, such as what airfoil to use, and what flow speed. With that hardware defined, I could move on to the supports, instrumentation, and free-surface plate. The dimensions of these limited the position of the gust generators, and helped define the sizes and trajectories of the generators.
Airfoil shape: The first question was which airfoil to use. I picked a NACA 0018 airfoil for a few reasons. First, it’s a symmetric airfoil so I don’t have to worry about zero-angle lift and picking a specific camber profile. The relatively thick profile means that it will stall gracefully at high angles of attack. The thickness also allows for mounting a rod within the airfoil to ensure it’s stiffness, reducing its lateral deflection. Additionally, other researchers have used the 0018 in related experiments. And we just so happened to have one in the lab.
Airfoil size: What are the limits on the size of the airfoil? This partially determines the Reynolds number of the flow, as well as the magnitude of forces and torques on the measurement system. I was worried about blockage effects in the tunnel, so I wanted the thickness to be under 5% of the width of the tunnel. This puts an upper length on the airfoil of about 13 cm. Just to use round numbers, 10 cm was chosen to be closer to useful. The airfoil we had was actually 4 inches long, giving c=10.16 cm. Using that, I was able to start experiments without waiting for fabrication. This airfoil extended a couple centimeters above the water’s surface, so its wetted span was b=46 cm, and the planform area was S = b c\, \text{cm}^2. Later, I designed another airfoil with the same dimensions and had it 3D printed out of a non-hygroscopic plastic, ensuring that it wouldn’t warp in the water. To make sure that it didn’t reflect much light in PIV experiments, I lightly sanded it, spray-painted it black and sanded it even more finely.
Flow speed: We wanted to be at high-ish speed to see high Reynolds number flow and avoid transitional separation and reattachment on the wing. For a nice round number, I aimed for Re = U c/\nu \approx 20,000, giving U = 0.2 m/s.
Free surface plate: This was basically an acrylic plate (black, to reduce reflections) that had been laser-cut to allow the airfoil to sit at different angles of attack. I designed it to have a 3 mm gap around the airfoil, in case of slight misalignments. To keep the semicircular pieces in place around the airfoil, they had scrap bits of acrylic glued on to their upper surfaces, which rested on the main part of the plate. The was suspended from pillow blocks on the tunnel’s rails, using threaded rods. Rotating the rods made it easy to precisely adjust its height to match the water’s surface.

Airfoil instrumentation: I wanted to sense the forces and torques as carefully as possible, but without overloading the sensors. The major forces would be due to gravity (which I initially ignored) and lift: L = \frac{1}{2} \rho U^2 S C_L . With a rough lift coefficient of 1, this means that the lift magnitude should be less than 1 Newton. The torque was the more troubling factor. The torque due to lift on the sensor is T_L = L (b/2+a) , where a is the distance from the sensor to the water’s surface. With no extra length, the torque is about 220 N*mm, which overloads a lot of the available sensors! Eventually, I found a sensitive sensor that could handle a longer mounting distance.
Support structure: It’s hard to attach things to other things! Basically, I used some 80/20 to attach a flat mounting plate to pillow blocks on the tunnel’s rails. I knew that I wanted to precisely rotate the airfoil between experiments, and found that an optical rotary stage was perfect. I also needed a force transducer for measuring forces and torques. I made a sequence of plates that could be attached with screws, with a a thick aluminum rod keeping the force sensor up and away from the water. This rod required some iteration, since the initial version was too heavy, so the sensor saturated. The second version used a thinner rod, and kept the forces within the calibrated limits.

You may ask why the force transducer isn’t even closer, if torques were an issue. This is left over from other experiments that allowed for control of a flap on the wing. The barbell section allowed for mounting a servomotor and rotary encoder for controlling the flap. It didn’t end up necessary, and it complicated the experiments unnecessarily. You can see the fancy version here:

Heaving gust generator plates: The heaving plates needed a thickness, length, shape, and material. To match the Reynolds number of the airfoil, the first plate was made with the same chord length. The next plate was half the length, to examine Reynolds number effects. To match the assumptions made in thin airfoil theory, the plates were thin: 1/4 inch. They were fabricated from aluminum to reduce rust and ensure strength, and with rounded leading and trailing edges to reduce flow separation.
Heaving apparatus: There were three versions! The first two versions used a ball screw to drive a bearing back and forth, with the plate mounted to this. The first method had some wiggle in the system due to the asymmetric design. This was acceptable for prototyping, but needed improvement. The second image omits the ball screw, but you can see that there are two rods on either side (the screw passes through the vertical hole, which is the bearing), which reduced the wiggle. The third version was an upgrade of the facility, which I wish I could take credit for. This was a CNC device that could move the plate along all three axes (and rotate vertically), and was generally fancy and useful.



Pitching airfoil, apparatus: Since I had that extra NACA 0018 lying around, I used that as the pitching airfoil. This was mounted to the fancy CNC system with some plates and screws and stuff. Since the CNC machine could move vertically, this took substantially less precision in the design.
Limits of trajectories: Here is a cross-section of the tunnel with the heaving plate and downstream airfoil, showing a lot of the parameters of their motion.

Heaving plate 
Pitching airfoil
So many parameters. The easiest to address is \delta x, since that is limited by the length of the test section. There’s room for about \delta x = 7.5 c, which seemed reasonable. That’s enough distance to keep the gust generators from strongly influencing the airfoil directly.
How should the heaving plate move? I want it to initially sit motionless, then move upward with a constant speed, then return at the same speed, and stop at its initial position. For that to happen, we would need infinite acceleration, so let’s smooth it a bit. It turns out that a good function for that is the Eldredge function, which looks like what I described but with smoothed corners. The smoothing time was relatively short, resulting in a change of direction in under one convective time unit ( t_c = c/U). I would have liked it to be much smaller, but the actuators weren’t strong enough to accelerate that quickly. The main resulting parameters were the dimensionless time it travels in one direction ( T = t_{heave}/t_c ), and the dimensionless heaving speed ( S = V_{heave}/U ). T gives a measure of how long the flow has been developing around the heaving plate. With small T , the regular flow around the plate is still evolving, whereas large T should show regular vortex shedding. The heaving speed can be thought of as related to the effective angle of attack, \alpha_{eff} = \tan(S) . At high S , the flow around the plate should be stalled and separated.
I limited S\leq 1 to reduce the strain of acceleration on the equipment. On the other hand, if S\leq 0.05, then the change in direction won’t generate a distinct vortex, and instead look like a slight kink in the wake. If the plate is to heave across the full width of the tunnel, then T is inversely proportional to S , yielding an upper limit on T. The lower limit of T \geq 1 keeps the plate from interacting with its own starting vortex, canceling out the shed vortex.
For the pitching airfoil, I want it to move smoothly (but quickly) from zero angle of attack to the final angle; the hyperbolic tangent function is fine for that. Most finished pitching within ( 1 t_c ). With an initial angle of attack of \alpha_1 , the main control parameter was \alpha_2 .
Trajectory parameter choices: To pick the exact values of T, \, S, and \alpha_2 , I had to remind myself that I was going to throw vortices at an airfoil and compare the two generation methods. That meant that I wanted to release the vortices at the same positions with the same strengths. First, I chose a set of release heights, relative to the instrumented airfoil. These defined the height at which the heaving plate changed directions. Next, I chose the heaving speeds to have effective angles of attack of [5, 20, 45] degrees, since the flow around the plate at those static angles would be substantially different. The combination of heaving speeds and distances yielded the values of T .
Since I wanted to match the vortex strength with the pitching airfoil, I used analytic unsteady thin airfoil theory to approximate the strength of the generated vortices for both methods. This yielded the appropriate range of \alpha_2 .
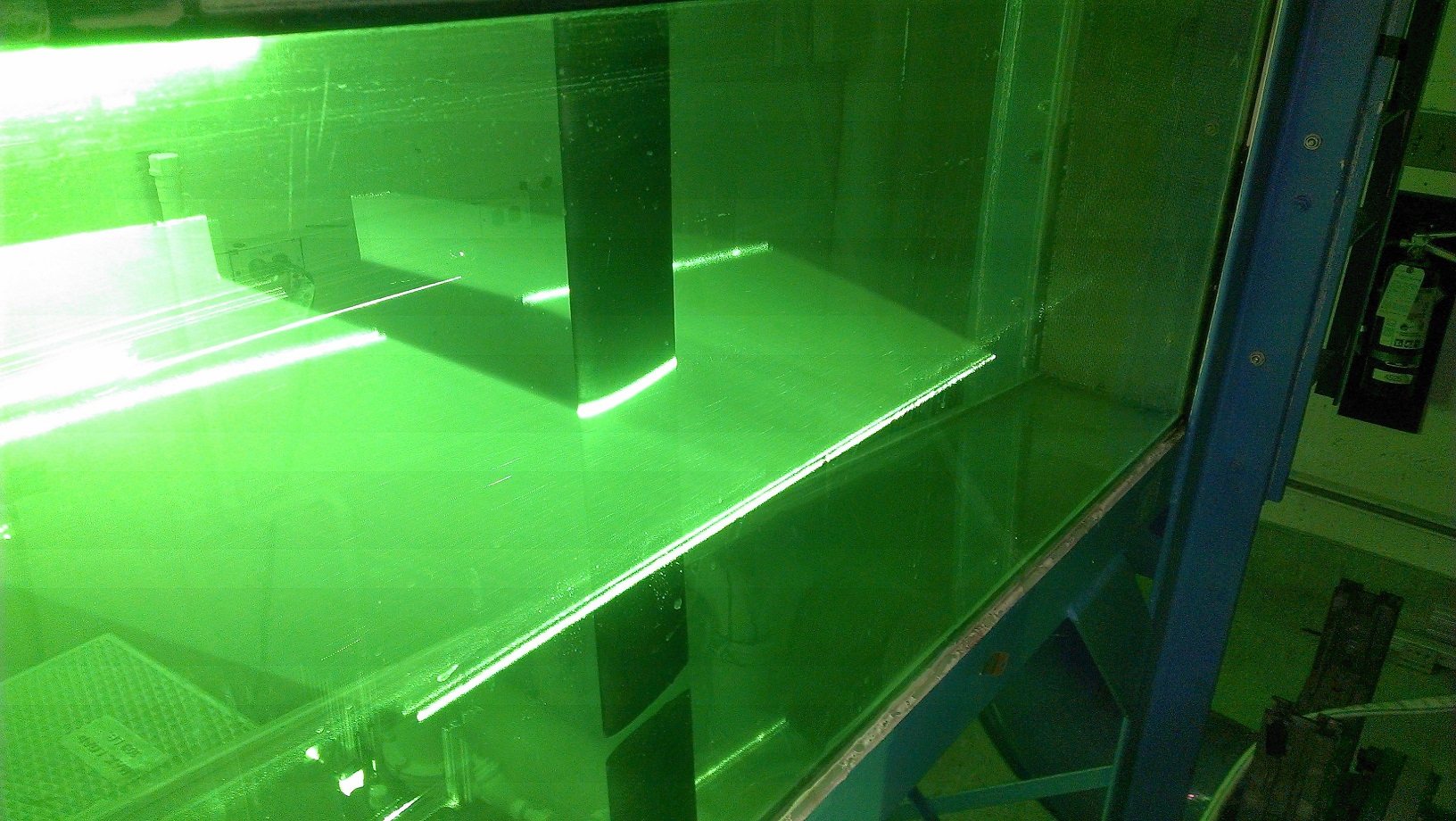
Particle image velocimetry: Where? How big? What frequency? Well, I wanted to see a few things: development of flow around the heaving plate, evolution of the vortex as it travels downstream, the interaction between the vortex and the wing, and check for spanwise variation of the vortex. That means four different positions of the cameras for imaging. For the heaving plate, I stacked the cameras along the width of the tunnel to image the full heave of the plate. For the vortex evolution, I placed the cameras along the streamwise direction, with the release point at the start of the field of view. To see the vortex interaction, I zoomed in more, and slid the cameras to have the airfoil in the center of the field of view. The fourth set required stacking the cameras vertically, along the span of the wing.
The precise positioning and size and zoom level? These were basically determined by eye (semi-arbitrarily), making sure that the field of view was big enough to hold all that I wanted to see. The frequency of image capture was chosen to make sure that the imaged particles didn’t move too far, but moved far enough to ensure that a substantial period of time was observed with the 2048 frames available. This took some trial and error, and ended up being about 200 Hz. This gave a sampling time of about 10 seconds, or 19 t_c. Lots of time!

PIV for the heaving plate. Calibration plate currently in the tunnel. 
Running PIV around the airfoil. 
Close-up of PIV around the airfoil. 
Spanwise PIV with stacked cameras
Sampling rates: For some experiments, I had simultaneous force/torque measurements, actuation and position measurements, and PIV. The PIV was running at 200 Hz, yielding a very high Strouhal number of 106. I didn’t expect anything interesting to happen at higher frequencies, so the forces were measured at 200 Hz for convenience, and the position of the gust generator was also commanded/measured at that frequency. This made synchronizing the systems much simpler. I also ran some tests with much higher sampling frequencies, but the additional temporal resolution made no difference other than filling the hard drive faster.
Data analysis, presentation
I’ve got so much data! Lots of PIV velocity fields, forces, torques, and positions. How do I turn all of this into useful, understandable data? I’ll start with each type of measurement separately.
Positions: These were the first plots that I looked at, just to make sure that the actuators were actually following the commanded trajectories. I had to discard and re-run a couple trials when things went badly. Luckily, most of them were fine. These were easy to present, looking like time vs position (or angle) plots.
Forces/torques: First, I plotted everything. I made a ridiculously huge number of plots, just to make sure the data looked OK: no saturation, reasonable levels of forces, no drop-outs, no crazy spikes. And I checked that the corrected torques were very similar to the measured forces, to ensure spanwise uniformity. Next, I applied a low-pass filter to remove frequencies above 10 Hz, removing the effects of the pump. For comparison, the approximate vortex shedding frequency at this size and speed would be about 2 Hz. I wanted to compare the forces across different experiments, but there was a lot of high-frequency stuff happening, which wasn’t aligned across repetitions of the same parameters. So I separated the remaining forces into portions above and below 1.12 Hz, which seemed to separate the vortex shedding from the larger behavior. The low-frequency content was useful for comparing experiments, and the high-frequency content let me know how much oscillation there was, and variation across repetitions.
Now that I had some comparable force traces, I looked at the averaged lift forces for the different parameters, and identified general trends. This let me sort the results into groups, which turned out to depend on the position of the vortex, its strength, and its direction of rotation. These generally agreed with the simple theory, which was nice.
But how to present these? The simplest method was to show how the force traces changed in response to an input parameter. The following image shows an example of the effect of heaving distance on the lift, and with comparison to simple theories.

PIV: First, I made sure that the temporal averages of each flow field made sense. Then I applied some median filtering to remove spurious vectors, and masked out the airfoil or plate in the flow. Then I made videos of each flow, and watched them all. And the averaged videos. And the computed vorticity fields. I spent a lot of time making sure that the data appeared reasonable.
Next, I wanted to examine the strength, size, and positions of the generated vortices. This meant learning about vortex identification, and writing implementations that would work relatively quickly on the many PIV frames. (And these vortex ID algorithms have some parameters, such as the averaging radius, which must be hand-wavily justified.) Eventually, I was able to make a plot of the strength of the generated vortices, with error bars, as functions of the input parameters. I could also compare these to the theory-based predictions.
For the evolution of the vortices in space, I couldn’t follow them with the camera, so I had to improvise. Since the vortices mostly just translate in space, I basically applied a slit-scanning technique to ‘unwrap’ them. This was useful for seeing the general structure of the vortex and wake; whether it was tightly defined or with multiple messy strucures. Rather than showing the video, I was able to show a series of long views of the wakes.
The final type of visualization was videos like the following one. I had to choose the field of view, the color scheme, the plot ranges, etc. For vortical flows, it is useful to visualize the vorticity. Since this is a quantity that is both positive and negative, it was useful to have negative vorticity be blue, positive be red, and zero be white. Other people would use black, but I like to have the figures blend into the white background of a piece of paper. Also, I would have liked to show so many force traces, but it was only reasonable to show one experimental trace, the average across experiments, and the envelope of oscillation around that average. Any more lines than that, and people start to get confused.
Hindsight
What do I know now that I wish I knew then?
- Your initial project will probably not work. I didn’t talk about my first project here, which was to use flaps to control flow separation, especially in response to gusts. I got a lot of interesting data, but couldn’t find a coherent story. The part about gust generation worked well, however, and led to a more focused thesis. Unfortunately, it took a couple years to figure this out. The perils of research!
- Ask for help more. Most likely, other people have solved related problems before. Such as how to connect one thing to another in a stable way. Or how to control a stepper motor through LabVIEW.
- A lot of experiments have arbitrary parameter choices, which are often driven by legacy components or tools. It’s hard to perfectly optimize every single option, and you would get very diminishing returns. If you can properly justify the arbitrary choice, and show that it works, it’s fine.
- Some of your choices will be less than perfect. For example, I would probably have made cleaner gusts if I used airfoils instead of the flat plates. This probably wouldn’t have changed the overall results much, but would have reduced variation.
- Data organization and note-taking is key. I took plenty of notes about all my experiments and lots of reference pictures, but it was still difficult to pull them all together into a coherent outline. As I learned more about performing experiments and storing the data usefully, my organization improved and made it easier to handle the data. It would have been useful to have better organization at the start.
- Once you properly grasp the problem, and have a view of what an interesting story would be, then the end is in sight. After I had that realization, everything started coming together steadily. It still took a lot of work, but there was one meeting where we emerged from the fog with a solid outline of my thesis. That was a great feeling.